Welcome: Realtimes Beijing Technology Co.,LTD.
Language:
 ∷
∷

∷
∷
On April 19th this year, a "man-machine co running" marathon in Yizhuang, Beijing, made many people realize for the first time that robots can also suffer from heatstroke. At the competition site, engineers kept cooling the robot at the roadside: holding a fan, spraying dry ice spray to cool the joints, and adding ice blocks to the back to dissipate heat. This scene may seem a bit absurd, but it reveals a reality that is being overlooked: as computing power continues to improve, heat dissipation is becoming the new bottleneck of the robotics industry.

2026 Beijing Yizhuang humanoid robot half marathon robot cools down at supply station
1、 The overlooked truth: Many robots are not lacking in computing power, but rather "unable to heat up"
In the past year, we have been in contact with a large number of humanoid robot clients. Almost all teams will encounter similar problems: the module performance is good, the laboratory testing temperature is controllable, but as soon as the whole machine is installed, it starts to malfunction: frequency reduction, heating, and decreased stability.
The final positioning reason is quite counterintuitive: it's not that the radiator is not strong enough, but that the heat cannot be dissipated.
Most radiators are designed in this way:
Fan → blow air to module → reduce chip temperature
This method works fine on servers and PCs. But in humanoid robots, the situation is completely different: cold air enters, hot air stays, and the result is that a "thermal cycle" is formed inside the entire machine.
You will see a typical phenomenon: the chip temperature is normal, the cavity temperature keeps rising, and eventually the system becomes unstable.
3、 We did something against common sense: reversing the direction of the wind
Faced with this issue, we did not continue to optimize the 'blowing' function. But rather rethinking a question: is the essence of heat dissipation cooling or heat dissipation?
In the end, we made a seemingly simple but fundamentally changed design: reversing the direction of the fan.
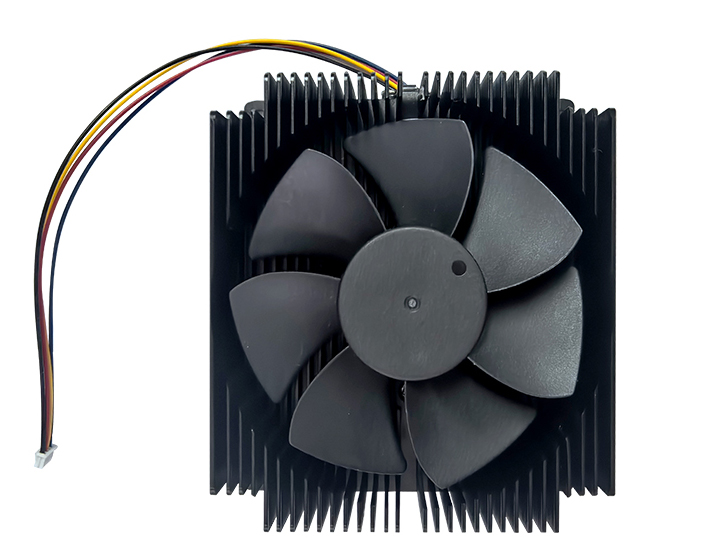
Launch: Thor module dedicated active heat sink (reverse fan) RTS-Thor-HS01R
4、 A small change, refactoring the entire heat dissipation logic
Traditional solution: Push inward
Our solution: Pull/Exhaust
The airflow path becomes:
Air → passes through fins → is drawn away by a fan → is expelled from the system
The significance of this change lies in upgrading from "local cooling" to "system heat dissipation"
Inside humanoid robots, the cooling environment has several typical characteristics:
▪ Space closure
▪ Dense heat source
▪ Continuous posture changes
The exhaust structure can actively bring hot air out of the system, avoiding the accumulation of heat circulating in the cavity
This radiator not only serves the module, but also serves as the "exhaust node" for the entire machine
Not dependent on the direction of gravity, the airflow is more stable and more suitable for walking robots
Effective heat dissipation can be achieved without the need for complex air ducts
The product has completed engineering validation:
Thermal resistance: 0.19 ℃/W
Airflow: 56.73 CFM
Speed: 0-6000 RPM
Power: 18W
Noise: up to 58.8 dBA
Material: AL6063
Can stably support long-term operation of high computing power modules.
Not a 'radiator', but a more stable system capability
Temperature stability is essential for stable computing power
No need to repeatedly debug the air duct, it can be directly integrated for use
Avoid later "hot issues and thunderstorms"
Support the evolution of higher power consumption platforms
In the past, radiators were just "accessories"
Now: Heat sinks are becoming a part of system capabilities
When computing power enters humanoid robots, heat dissipation is no longer about "blowing harder", but about "pushing the tropics away".
▪ humanoid robot
▪ High computing edge devices
We can provide:
▪ Design of overall heat dissipation architecture
▪ Suggestions for optimizing air ducts
▪ Customized heat dissipation solution
Contact: James
Service Hotline: 400-100-8358
Email: info@realtimes.cn
Add: 11th Floor, Block B, 20th Heping Xiyuan, Heping west street, Chaoyang District, Beijing 100013,P.R.China
